fred-j.org
Projets
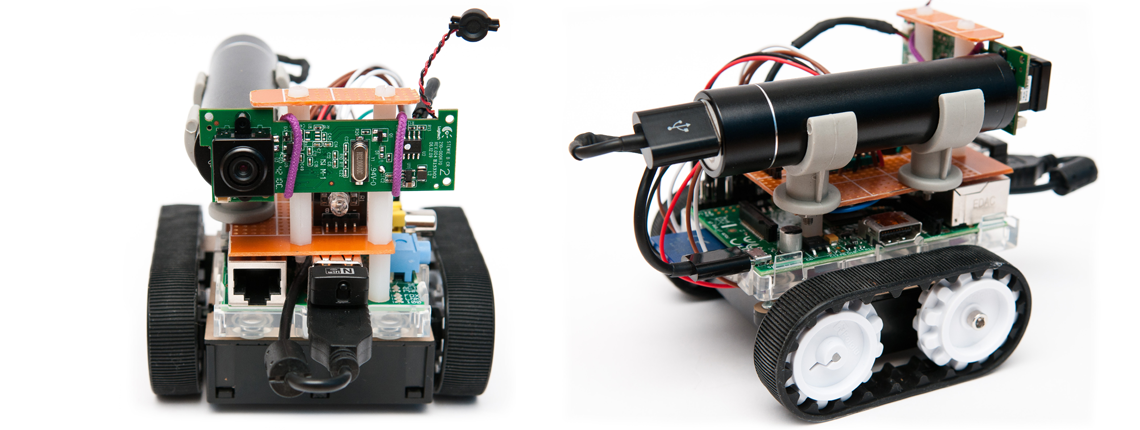
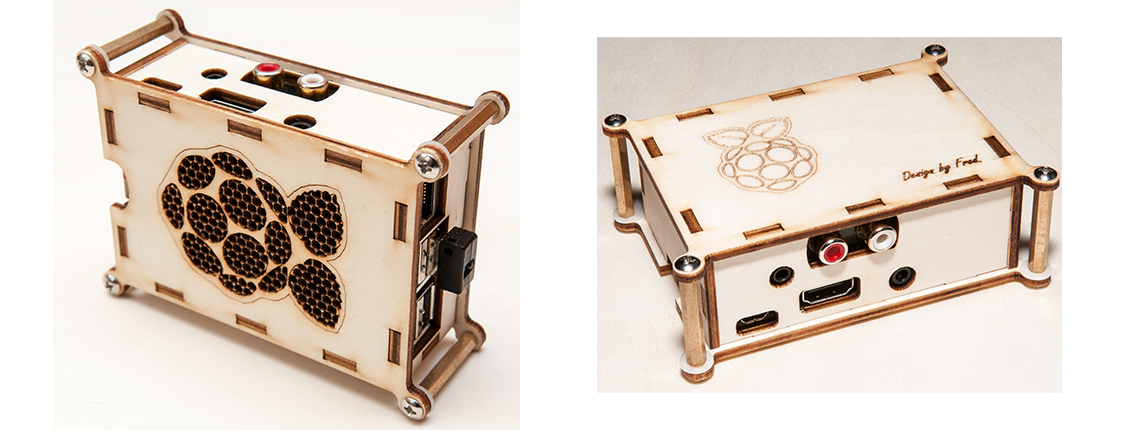
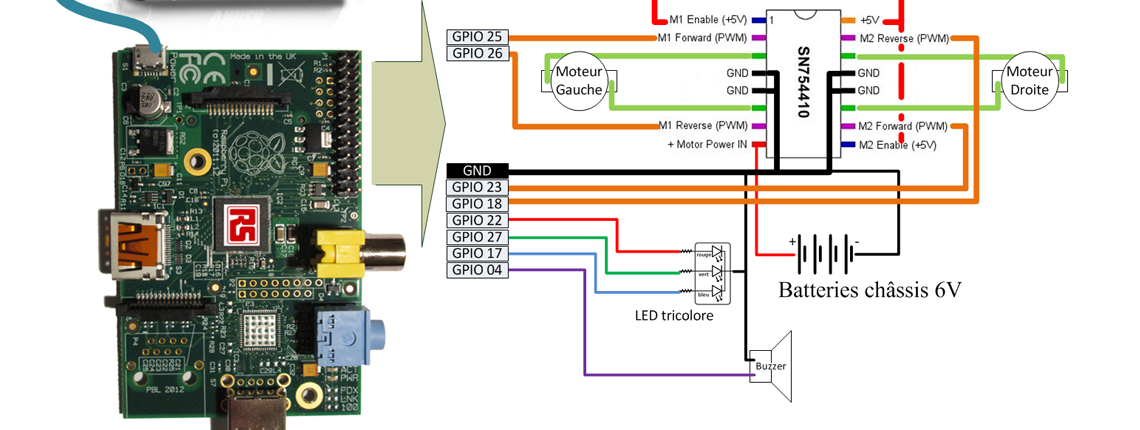
Raspberry Zumo
Graph
Température
Humidity
Cuve
MRTG
Mon IP
‹
›